RED BEAN CULTIVATION WITH GR-ADZUKI6
水やりを行うために水中ポンプを購入しまし
RED BEAN CULTIVATION WITH GR-ADZUKI1
GR-ADZUKIで小豆栽培を始めようと
GR-SAKURA DC MOTOR
GR-SAKURAでDCモータを動かしま
GR-ADZUKI MOTOR
今回は、GR-ADZUKIでモータを動か
RL78/G1E DRV8830
ピエゾセンサに振動を与えるためにDCモー
24V Motor Control Evaluation System for RX23T
24V Motor Control Ev
自己紹介
最近の投稿
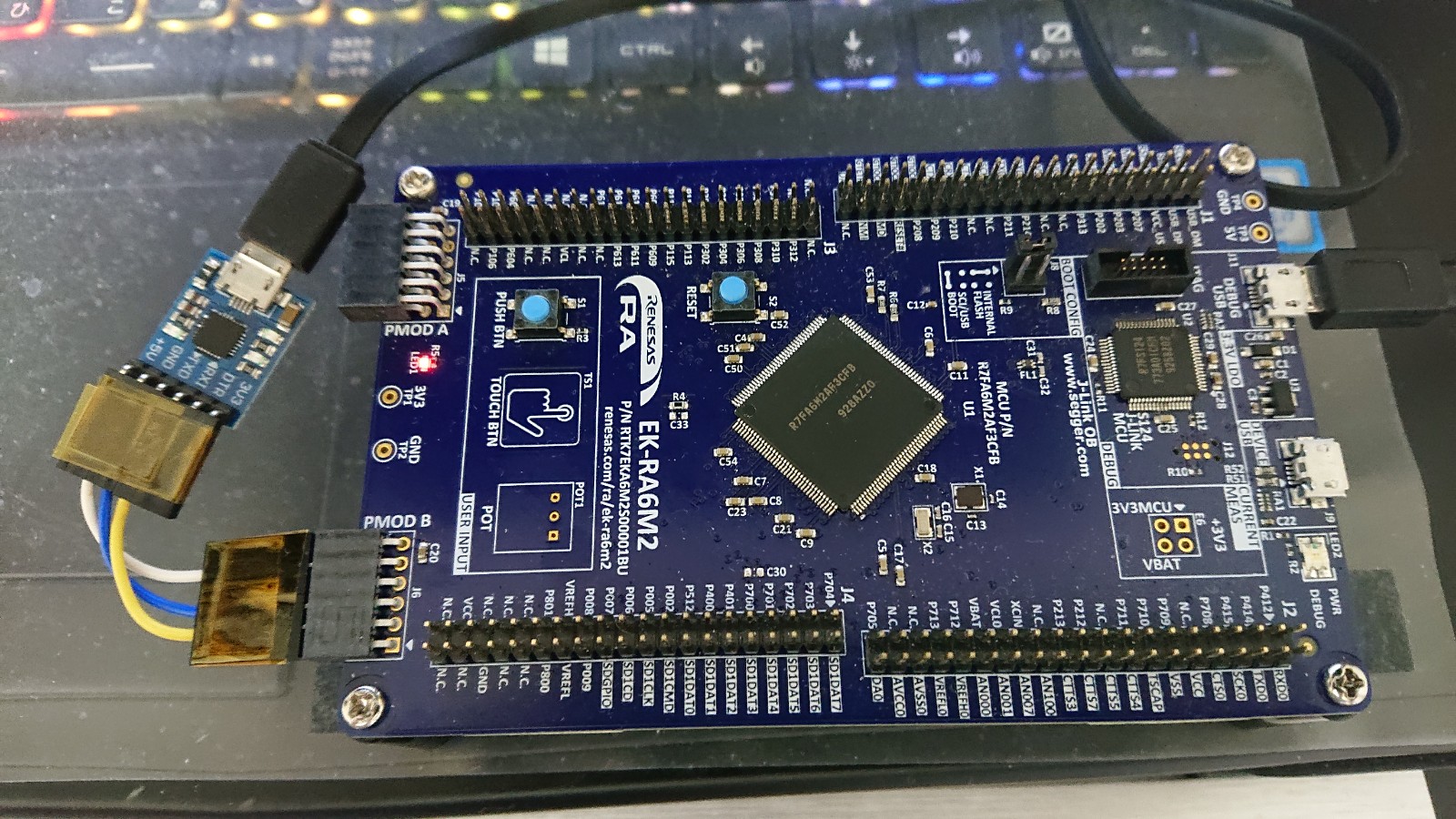
- EK-RA6M2 Evaluation kit7
- EK-RA6M2 Evaluation kit6
- EK-RA6M2 Evaluation kit5
- EK-RA6M2 Evaluation kit4
- EK-RA6M2 Evaluation kit3
最近のコメント
- Renesas Electronics fan site に より
- GR-KAEDE RORTARY ENCODER に より
- GR-KAEDE RORTARY ENCODER に より
- Renesas Electronics fan site に より
アーカイブ
- 2020年10月
- 2020年9月
- 2020年8月
- 2020年3月
- 2019年12月
- 2019年3月
- 2019年1月
- 2018年12月
- 2018年11月
- 2018年10月
- 2018年9月
- 2018年8月
- 2018年7月
- 2018年6月
- 2018年5月
- 2018年4月
- 2018年3月
- 2018年2月
- 2018年1月
- 2017年12月
- 2017年11月
- 2017年7月
- 2017年6月
- 2017年5月
- 2017年2月
- 2017年1月
- 2016年12月
- 2016年11月
- 2016年10月
- 2016年9月
- 2016年8月
- 2016年7月
- 2016年6月
- 2016年5月
- 2016年4月
- 2016年3月
- 2016年2月
- 2016年1月
- 2015年12月
- 2015年11月
- 2015年10月
- 2015年9月
- 2015年8月
- 2015年7月
- 2015年6月
- 2015年2月