GR-ADZUKI OLED DISPLAY
GR-ADZUKIにOLEDディスプレイ
RL78/G1E DRV8830
ピエゾセンサに振動を与えるためにDCモー
RL78/G10 P16 I2C_LCD
小さきなガジェットの続きです。 R5F1
RL78/G14+OLED+UART
【QB-R5F104LE-TB】を使うた
GR-KURUMI VOLUME PEDAL
これまでデジタルポテンショメータを試して
GR-KURUMI AND MCP4018
マイコンで抵抗を変化させるためにデジタル
GR-COTTON GADGET
COTTONを使用してガジェットを作成し
I2C LCD ON GR-KURUMI
GR-KURUMIでI2Cを使用してみま
自己紹介
最近の投稿
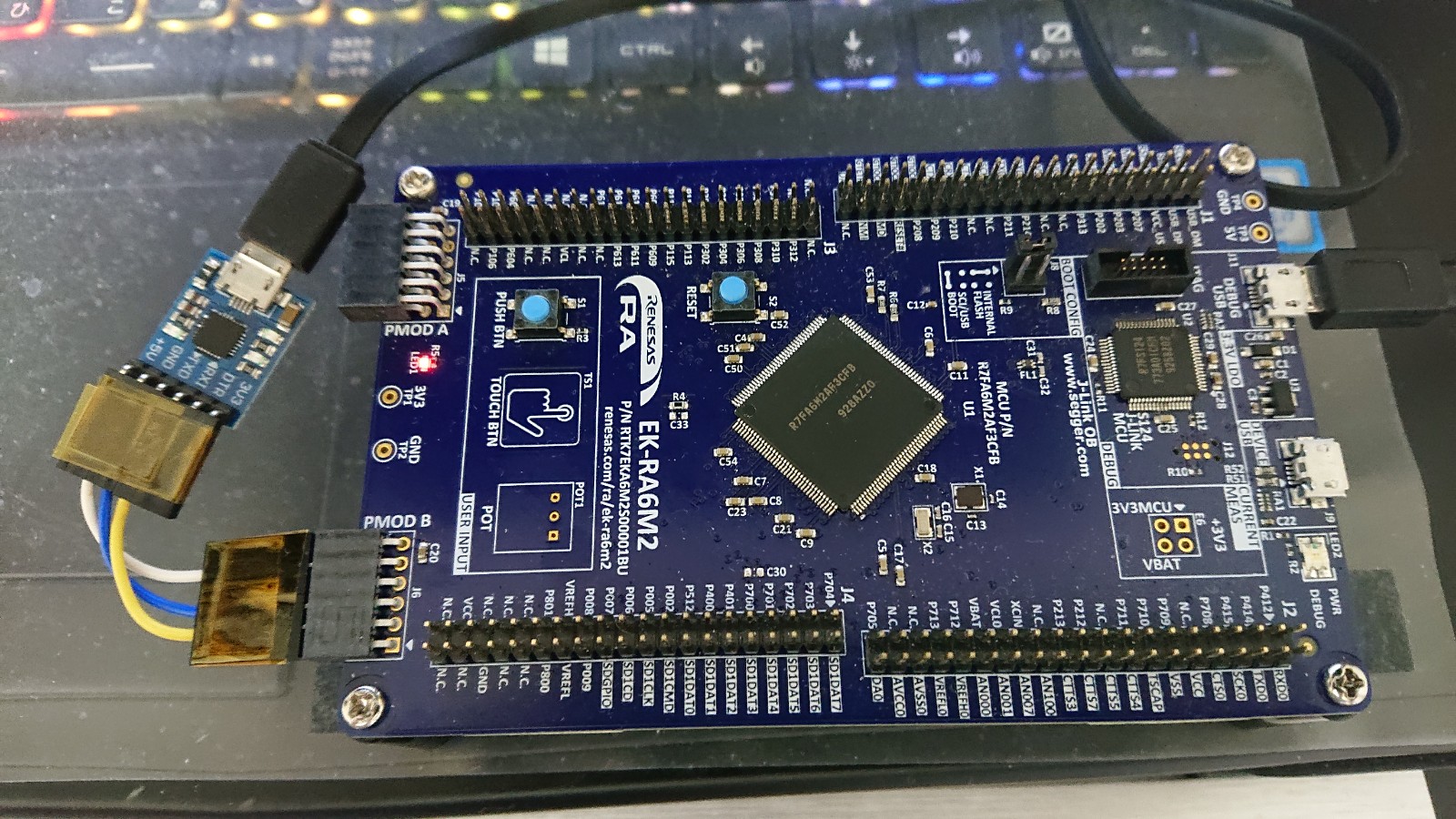
- EK-RA6M2 Evaluation kit7
- EK-RA6M2 Evaluation kit6
- EK-RA6M2 Evaluation kit5
- EK-RA6M2 Evaluation kit4
- EK-RA6M2 Evaluation kit3
最近のコメント
- Renesas Electronics fan site に より
- GR-KAEDE RORTARY ENCODER に より
- GR-KAEDE RORTARY ENCODER に より
- Renesas Electronics fan site に より
アーカイブ
- 2020年10月
- 2020年9月
- 2020年8月
- 2020年3月
- 2019年12月
- 2019年3月
- 2019年1月
- 2018年12月
- 2018年11月
- 2018年10月
- 2018年9月
- 2018年8月
- 2018年7月
- 2018年6月
- 2018年5月
- 2018年4月
- 2018年3月
- 2018年2月
- 2018年1月
- 2017年12月
- 2017年11月
- 2017年7月
- 2017年6月
- 2017年5月
- 2017年2月
- 2017年1月
- 2016年12月
- 2016年11月
- 2016年10月
- 2016年9月
- 2016年8月
- 2016年7月
- 2016年6月
- 2016年5月
- 2016年4月
- 2016年3月
- 2016年2月
- 2016年1月
- 2015年12月
- 2015年11月
- 2015年10月
- 2015年9月
- 2015年8月
- 2015年7月
- 2015年6月
- 2015年2月