Roomba Control from GR-SAKURA
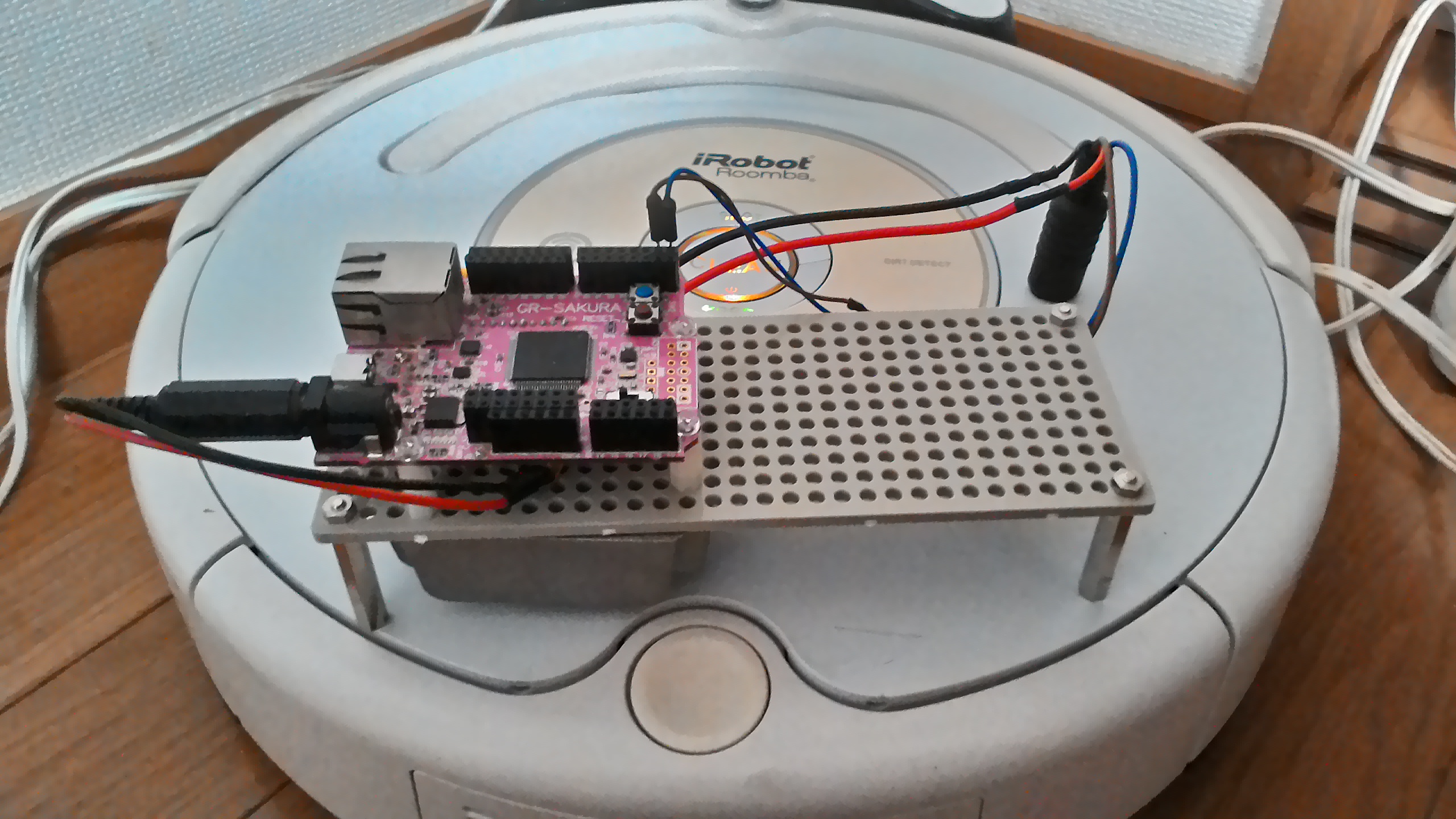
ロボット掃除機Roomba500をマイコン(GR-SAKURA:RX63n)からコントロールするプロジェクトを開始します。
以下のURLに通信仕様書があります。
http://www.irobot.lv/uploaded_files/File/iRobot_Roomba_500_Open_Interface_Spec.pdf
コネクタは千石電商で購入しました。
http://www.sengoku.co.jp/mod/sgk_cart/detail.php?code=EEHD-0T43
電源はRoombaのバッテリーからもらうためDC-DCコンバータを千石電商で購入しました。
http://www.sengoku.co.jp/mod/sgk_cart/detail.php?code=EEHD-0GNA
Roombaバッテリーは、14.4Vなのでこれを5Vに降圧して使います。
Roombaの通信信号電圧は5Vで、RX63nの3.3Vです。しかしRX63nのUART0は5Vトレラントなのでそのまま直結しました。
通信設定は、以下のとおりです。
Baud: 115200
Data bits: 8
Parity: None
Stop bits: 1
Flow control: None
通信テストのためRoombaのLEDを制御するコマンドを投げるプログラムを作成しました。
Serial sequence: [139] [LED Bits] [Clean/Power Color] [Clean/Power Intensity]
通信は、128、130の2バイトで始めるので
[128][130][139][LED Bits] [Clean/Power Color] [Clean/Power Intensity]
6バイトを送りします。
後半3バイト[LED Bits] [Clean/Power Color] [Clean/Power Intensity]を1秒後とに適当に変更するプログラムを作って試しました。無事LEDを任意にコントロール出来ました。
次は、Roombaを動かしてみたい思います。